Микроконтроллеры являются небольшими, но одновременно очень удобными приспособлениями для тех, кто желает создавать различные удивительные роботизированные или автоматизированные вещи у себя дома. В рамках этой статьи будет рассмотрено программирование AVR для начинающих, различные аспекты и нюансы этого процесса.
Общая информация
Микроконтроллеры можно встретить везде. Они есть в холодильниках, стиральных машинах, телефонах, станках на производстве, умных домах и ещё во множестве различных технических устройств. Их повсеместное применение обусловлено возможностью замены более сложных и масштабных аналоговых схем устройств. Программирование МК AVR позволяет обеспечить автономное управление над электронными устройствами. Эти микроконтроллеры можно представить как простейший компьютер, что может взаимодействовать с внешней техникой. Так, им под силу открывать/закрывать транзисторы, получать данные с датчиков и выводить их на экраны. Также микроконтроллеры могут осуществлять различную обработку входной информации подобно персональному компьютеру. Если освоить программирование AVR с нуля и дойти до уровня профессионала, то откроются практически безграничные возможности для управления различными устройствами с помощью портов ввода/вывода, а также изменения их кода.
Немного о AVR

В рамках статьи будет рассмотрено семейство микроконтроллеров, выпускаемых фирмой Atmel. Они имеют довольно неплохую производительность, что позволяет использовать их во многих любительских устройствах. Широко применяются и в промышленности. Можно встретить в такой технике:
- Бытовой. Стиральные машины, холодильники, микроволновые печи и прочее.
- Мобильной. Роботы, средства связи и так далее.
- Вычислительной. Системы управления периферийными устройствами, материнские платы.
- Развлекательной. Украшения и детские игрушки.
- Транспорт. Системы безопасности и управления двигателем автомобиля.
- Промышленное оборудование. Системы управления станками.
Это, конечно же, не все сферы. Они применяются там, где выгодно использовать не набор управляющих микросхем, а один микроконтроллер. Это возможно благодаря низкому энергопотреблению и Для написания программ используются языки С и Assembler, немного изменённые под семейство микроконтроллеров. Такие изменение необходимы из-за слабых вычислительных возможностей, которые исчисляются, как правило, в десятках килобайт. AVR-программирование без изучения этих языков не представляется возможным.
Как получить свой первый микроконтроллер?
AVR-программирование требует:
- Наличия необходимой среды разработки.
- Собственно самих микроконтроллеров.
Второй пункт рассмотрим подробнее. Существует три возможности обзавестись требуемым устройством:
- Купить непосредственно сам микроконтроллер.
- Обзавестись устройством в составе конструктора (например - Arduino).
- Собрать микроконтроллер самостоятельно.
В первом пункте ничего сложного нет, поэтому сразу перейдём ко второму и третьему.
Обзавестись устройством в составе конструктора

В качестве примера будет выбран известный Arduino. Это по совместительству удобная платформа для быстрой и качественной разработки различных электронных устройств. Плата Arduino включает в себя определённый набор компонентов для работы (существуют различные конфигурации). В неё обязательно входит AVR-контроллер. Этот подход позволяет быстро начать разработку устройства, не требует специальных умений и навыков, имеет значительные возможности в плане подключения дополнительных плат, а также в интернете можно найти много информации на интересующие вопросы. Но не обошлось и без минусов. Покупая Arduino, человек лишает себя возможности более глубоко окунуться в AVR-программирование, лучше узнать микроконтроллер, специфику его работы. Также негатива добавляет и относительно узкая линейка моделей, из-за чего часто приходится покупать платы под конкретные задачи. Особенностью также является и то, что программирование на "СИ" здесь отличается довольно сильно от стандартной формы. Несмотря на все свои недостатки, Arduino подходит для изучения новичкам. Но злоупотреблять не стоит.
Самостоятельная сборка
Следует отметить, что микроконтроллеры AVR отличаются достаточной дружелюбностью к новичкам. Собрать их самостоятельно можно с доступных, простых и дешевых комплектующих. Если говорить о плюсах, то такой подход позволяет лучше ознакомиться с устройством, самостоятельно выбирать необходимые комплектующие, подгоняя конечный результат под выдвигаемые требования, использование стандартных языков программирования и дешевизна. Из минусов можно отметить только сложность самостоятельной сборки, когда она осуществляется впервые, и нет нужных знаний и навыков.
Как работать?

Итак, допустим, что вопрос с микроконтроллером решился. Далее будет считаться, что он был приобретён или же куплен самостоятельно. Что ещё нужно, чтобы освоить AVR-программирование? Для этой цели нужна среда разработки (в качестве базиса подойдёт и обычный блокнот, но рекомендую остановиться на Notepad++). Хотя существуют и другие программы для программирования AVR, приведённое обеспечение сможет справиться со всеми требованиями. Также необходим программатор. Его можно приобрести в ближайшем магазине, заказать по интернету или собрать самостоятельно. Не помешает и печатная плата. Она не обязательна, но её использование позволяет сэкономить свои нервы и время. Также покупается/создаётся самостоятельно. И последнее - это источник питания. Для AVR необходимо обеспечить поступление напряжения на 5В.
Где и как учиться?
Создавать шедевры с нуля не получиться. Здесь необходимы знания, опыт и практика. Но где их взять? Существует несколько путей. Первоначально можно самостоятельно выискивать нужную информацию в мировой сети. Можно записать на курсы программирования (дистанционные или очные) для получения базовых навыков работы. Каждый подход имеет свои преимущества. Так, дистанционные курсы программирования будут более дешевыми, а может и бесплатными. Но если что-то не будет получаться, то при очных занятиях опытный разработчик сможет быстрее найти причину проблемы. Также не лишним будет ознакомиться с литературой, что находится в свободном доступе. Конечно, на одних книгах выехать не получится, но получить базовые знания про устройство, программирование на "СИ", "Ассемблере" и о других рабочих моментах можно.
Порты ввода/вывода

Это чрезвычайно важная тема. Без понимания того, как работают порты ввода/вывода, не представляется возможным внутрисхемное программирование AVR вообще. Ведь взаимодействие микроконтроллера с внешними устройствами осуществляется именно при их посредничестве. На первый взгляд новичка может показаться, что порт - это довольно запутанный механизм. Чтобы избежать такого впечатления, не будем детально рассматривать схему его работы, а только получим общее представление об этом. Рассмотрим программную реализацию. В качестве примера устройства был выбран микроконтроллер AtMega8 - один из самых популярных из всего семейства AVR. Порт ввода/вывода представляет собой три регистра, которые отвечают за его работу. На физическом уровне они реализовываются как ножки. Каждой из них соответствует определённый бит в управляющем реестре. Каждая ножка может работать как для ввода информации, так и для её вывода. Например, на неё можно повесить функцию зажигания светодиода или обработку нажатия кнопки. Кстати, три регистра, о которых говорилось, это: PORTx, PINx и DDRx. Каждый из них является восьмиразрядным (не забываем, что мы рассматриваем AtMega8). То есть один бит занимается определённой ножкой.
Работа регистров
Наиболее весомым в плане ориентации является управляющий DDRx. Он также является восьмиразрядным. Значения для него могут быть записаны 0 или 1. Как меняется работа контроллера при использовании нулей и единицы? Если в определённом бите выставить 0, то соответствующая ему ножка будет переключена в режим входа. И с неё можно будет считывать данные, что идут с внешних устройств. Если установить 1, то микроконтроллер сможет управлять чем-то (например, дать приказ транзистору пропустить напряжение и зажечь светодиод). Вторым по важности является PORTx. Он занимается управлением состояния ножки. Давайте рассмотрим пример. Допустим, у нас есть порт вывода. Если мы устанавливаем логическую единицу в PORTx, то посылается сигнал от микроконтроллера управляющему устройству начать работу. Например, зажечь светодиод. При установлении нуля он будет гаситься. То есть работать с управляющим регистром DDRx постоянно, нет надобности. И напоследок давайте о PINx. Этот регистр отвечает за отображение состояния ножки контроллера, когда она настроена на состояние ввода. Следует отметить, что PINx может работать исключительно в режиме чтения. Записать в него ничего не получится. Но вот прочитать текущее состояние ножки - это без проблем.
Работа с аналогами
AVR не являются единственными микроконтроллерами. Этот рынок поделен между несколькими крупными производителями, а также между многочисленными китайскими имитирующими устройствами и самоделками. Во многом они подобны. К примеру, программирование PIC/AVR сильно не отличается. И если есть понимание чего-то одного, то понять всё остальное будет легко. Но начинать путь рекомендуем всё же с AVR благодаря его грамотной структуре, дружелюбности к разработчику и наличию большого количества вспомогательных материалов, из-за чего процесс разработки можно значительно ускорить.
Техника безопасности

Когда будет вестись программирование микроконтроллеров AVR на "СИ" или на "Ассемблере", то необходимо работать очень осторожно. Дело в том, что выставив определённую комбинацию регистров и изменив внутренние настройки, можно спокойно заблокировать микроконтроллер. Особенно это касается фьюзов. Если нет уверенности в правильности своих действий, то лучше отказаться от их использования. Это же относится и к программаторам. Если покупать заводскую аппаратуру, то она будет прошивать микроконтроллеры без проблем. При сборке своими руками может возникнуть печальная ситуация, при которой программатор заблокирует устройство. Это может произойти как из-за ошибки в программном коде, так и через неполадки в нём самом. Кстати, об ещё одном (на этот раз позитивном) моменте, который ранее вскользь упоминался, но так и не был раскрыт полностью. Сейчас практически все современные микроконтроллеры обладают функцией внутрисхемного программирования. Что это значит? Допустим, что устройство было запаяно на плате. И чтобы сменить его прошивку, сейчас не нужно его выпаивать, ведь такое вмешательство может повредить сам микроконтроллер. Достаточно подключиться к соответствующим выводам и перепрограммировать его при их посредстве.
Какую модель выбрать?
В рамках статьи была рассмотрена AtMega8. Это довольно посредственный за своими характеристиками микроконтроллер, которого, тем не менее, хватает для большинства поделок. Если есть желание создать что-то масштабное, то можно брать уже своеобразных монстров вроде Atmega128. Но они рассчитаны на более опытных разработчиков. Поэтому, если нет достаточного количества опыта, то лучше начинать с небольших и простых устройств. К тому же они и значительно дешевле. Согласитесь, одно дело случайно заблокировать микроконтроллер за сто рублей, а совсем иное - за полтысячи. Лучше набить себе руку и разобраться в различных аспектах функционирования, чтобы в последующем не терять значительные суммы. Первоначально можно начать с AtMega8, а потом уже ориентироваться по своим потребностям.
Заключение

Вот и была рассмотрена тема программирования AVR в самых общих чертах. Конечно, ещё о многом можно рассказывать. Так, к примеру, не было рассмотрено маркирование микроконтроллеров. А оно может о многом сказать. Так, в основном микроконтроллеры работают на напряжении в 5В. Тогда как наличие, к примеру, буквы L может сказать о том, что для работы устройства достаточно только 2,7 В. Как видите, порой знания о маркировке могут сыграть очень важную роль в плане корректной и долговечной работы устройств. Время функционирования микроконтроллеров - это тоже интересная тема. Каждое устройство рассчитано на определённый период. Так, некоторые могут отработать тысячу часов. Другие же имеют гарантийный запас в 10 000!
Министерство образования и науки Российской Федерации
Государственное образовательное учреждение
высшего профессионального образования
«САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ
МОРСКОЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ»
Е. В. Коротицкий, Ю. Е. Коротицкая
Основы языка си для микроконтроллеров avr
Учебное пособие
Санкт-Петербург
1. Основы языка Си для микроконтроллеров avr
Универсальный язык С был разработан как инструмент для написания операционной среды UNIX.
Язык С поддерживает процедурно-ориентированную парадигму программирования, т.е. парадигма – взаимосвязанный набор процедур.
Для языка Си характерны лаконичность, современный набор конструкций управления потоком выполнения, структур данных и обширный набор операций.
Препроцессор языка Cи его команды
Препроцессор (макропроцессор) - это составная часть языка Си, которая обрабатывает исходный текст программы до того, как он пройдет через компилятор. Препроцессор читает строки текста и выполняет действия, определяемые командными строками. Если первым символом в строке, отличным от пробела, является символ #, то такая строка рассматривается препроцессором как командная. Командные строки называются директивами препроцессора.
Препроцессор компилятора CodeVisionAVRимеет несколько директив. В Табл. 1 даётся их краткое описание.
Табл. 1 –Директивы препроцессора компилятора CodeVisionAVR
|
Директива |
Назначение |
|
Используется для включения в программу другого файла |
|
|
Используется для замены одних лексических единиц языка Си на другие, а также для генерации макросов |
|
|
Используется для отмены действия директивы #define |
|
|
Используются для условной компиляции |
|
|
Используется для изменения встроенных макросов _LINE_и_FILE_ |
|
|
Позволяет остановить компиляцию и отобразить сообщение об ошибках |
|
|
Используются для включения в исходную программу ассемблерного кода |
|
|
Разрешает специальные директивы компилятора |
ВСЕ директивы препроцессора начинаются со знака #. После директив препроцессора точка с запятой НЕ СТАВИТСЯ.
Директива #include
Пример:
Директива # include
#include "имя_файла" и #include <имя_файла>
Имя_файла состоит из имени файла.
Директива # include широко используется для включения в программу так называемых заголовочных файлов (файлы с расширением. h ), содержащих определения периферийных устройств и векторов прерываний используемого микроконтроллера, прототипы библиотечных функций, прототипы функций, определённых пользователем, и т. д.
#include "имя_файла.h"
Директивы #define, #undef
Директива # define служит для замены часто использующихся одних лексических единиц языка Си (констант, ключевых слов, операторов или выражений) на другие, так называемыеидентификаторы. Идентификаторы, заменяющие текстовые или числовые константы, называютименованными константами. Идентификаторы, заменяющие фрагменты программ, называютмакроопределениями, причём макроопределения могут иметь аргументы.
Директива # define имеет две синтаксические формы:
#define идентификатор текст
#define идентификатор (список параметров) текст
Перед компиляцией программы препроцессор в соответствии с директивой # define заменит все идентификаторы, встречающиеся в программе, на соответствующий им текст.
Пример:
#define А 15 #define В (А+20) // Эти директивы заменят в тексте программы
каждый идентификатор А на число 15, а каждый идентификатор В на выражение (15+20) вместе с окружающими его скобками.
Пример:
#define X(a,b,c) ((а)*(b)-(с)) // Препроцессор в соответствии с этой директивой заменит фрагмент Y=X(k+m,k-m,n); на фрагмент
В этом учебном курсе по avr я постарался описать все самое основное для начинающих программировать микроконтроллеры avr . Все примеры построены на микроконтроллере atmega8 . Это значит, что для повторения всех уроков вам понадобится всего один МК. В качестве эмулятора электронных схем используется Proteus - на мой взгляд, - лучший вариант для начинающих. Программы во всех примерах написаны на компиляторе C для avr CodeVision AVR. Почему не на каком-нибудь ассемблере? Потому что начинающий и так загружен информацией, а программа, которая умножает два числа, на ассемблере занимает около ста строк, да и в сложных жирных проектах используют С. Компилятор CodeVision AVR заточен под микроконтроллеры atmel, имеет удобный генератор кода, неплохой интерфейс и прямо с него можно прошить микроконтроллер.
В этом учебном курсе будет рассказано и показано на простых примерах как:
- Начать программировать микроконтроллеры, с чего начать, что для этого нужно.
- Какие программы использовать для написания прошивки для avr, для симуляции и отладки кода на ПК,
- Какие периферийные устройства находятся внутри МК, как ими управлять с помощью вашей программы
- Как записать готовую прошивку в микроконтроллер и как ее отладить
- Как сделать печатную плату для вашего устройства
- Proteus - программа-эмулятор (в ней можно разработать схему, не прибегая к реальной пайке и потом на этой схеме протестировать нашу программу). Мы все проекты сначала будем запускать в протеусе, а потом уже можно и паять реальное устройство.
- CodeVisionAVR - компилятор языка программирования С для AVR. В нем мы будем разрабатывать программы для микроконтроллера, и прямо с него же можно будет прошить реальный МК.
 Он нам предлагает посмотреть проекты которые идут с ним, мы вежливо отказываемся. Теперь давайте создадим в ней самую простую схему. Для этого кликнем на значок визуально ничего не происходит. Теперь нужно нажать на маленькую букву Р (выбрать из библиотеки)
в панели списка компонентов, откроется окно выбора компонентов
Он нам предлагает посмотреть проекты которые идут с ним, мы вежливо отказываемся. Теперь давайте создадим в ней самую простую схему. Для этого кликнем на значок визуально ничего не происходит. Теперь нужно нажать на маленькую букву Р (выбрать из библиотеки)
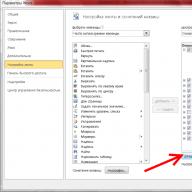
в панели списка компонентов, откроется окно выбора компонентов  в поле маска вводим название компонента, который мы хотим найти в библиотеке. Например, нам нужно добавить микроконтроллер mega8
в поле маска вводим название компонента, который мы хотим найти в библиотеке. Например, нам нужно добавить микроконтроллер mega8  в списке результатов тыкаем на mega8 и нажимаем кнопку ОК
. У нас в списке компонентов появляется микроконтроллер mega8
в списке результатов тыкаем на mega8 и нажимаем кнопку ОК
. У нас в списке компонентов появляется микроконтроллер mega8 Таким образом добавляем в список компонентов еще резистор, введя в поле маска слово res
и светодиод led
Таким образом добавляем в список компонентов еще резистор, введя в поле маска слово res
и светодиод led

 Чтобы разместить детали на схеме, кликаем на деталь, далее кликаем по полю схемы, выбираем место расположения компонента и еще раз кликаем. Для добавления земли или общего минуса на схему слева кликаем "Терминал" и выбираем Ground. Таким образом, добавив все компоненты и соединив их, получаем вот такую простенькую схемку
Чтобы разместить детали на схеме, кликаем на деталь, далее кликаем по полю схемы, выбираем место расположения компонента и еще раз кликаем. Для добавления земли или общего минуса на схему слева кликаем "Терминал" и выбираем Ground. Таким образом, добавив все компоненты и соединив их, получаем вот такую простенькую схемку
 Все, теперь наша первая схема готова! Но вы, наверное, спросите, а что она может делать? А ничего. Ничего, потому что для того, чтобы микроконтроллер заработал, для него нужно написать программу. Программа - это список команд, которые будет выполнять микроконтроллер. Нам нужно, чтобы микроконтроллер устанавливал на ножке PC0
логический 0 (0 вольт) и логическую 1 (5 вольт).
Все, теперь наша первая схема готова! Но вы, наверное, спросите, а что она может делать? А ничего. Ничего, потому что для того, чтобы микроконтроллер заработал, для него нужно написать программу. Программа - это список команд, которые будет выполнять микроконтроллер. Нам нужно, чтобы микроконтроллер устанавливал на ножке PC0
логический 0 (0 вольт) и логическую 1 (5 вольт).
Написание программы для микроконтроллера
Программу мы будем писать на языке С в компиляторе CodeVisionAVR. После запуска CV, он спрашивает нас, что мы хотим создать: Source или Project Мы выбираем последнее и нажимаем кнопку ОК. Далее нам будет предложено запустить мастер CVAVR CodeWizard (это бесценный инструмент для начинающего, потому как в нем можно генерировать основной скелет программы)
Мы выбираем последнее и нажимаем кнопку ОК. Далее нам будет предложено запустить мастер CVAVR CodeWizard (это бесценный инструмент для начинающего, потому как в нем можно генерировать основной скелет программы)  выбираем Yes
выбираем Yes
 Мастер запускается с активной вкладкой Chip, здесь мы можем выбрать модель нашего МК - это mega8, и частоту, на которой будет работать МК (по умолчанию mega8 выставлена на частоту 1 мегагерц), поэтому выставляем все, как показано на скриншоте выше.
Переходим во вкладку Ports
Мастер запускается с активной вкладкой Chip, здесь мы можем выбрать модель нашего МК - это mega8, и частоту, на которой будет работать МК (по умолчанию mega8 выставлена на частоту 1 мегагерц), поэтому выставляем все, как показано на скриншоте выше.
Переходим во вкладку Ports
 У микроконтроллера atmega8 3 порта: Port C, Port D, Port B. У каждого порта 8 ножек. Ножки портов могут находиться в двух состояниях:
У микроконтроллера atmega8 3 порта: Port C, Port D, Port B. У каждого порта 8 ножек. Ножки портов могут находиться в двух состояниях: - Выход
- DDRx.y = 0 - вывод работает как ВХОД
- DDRx.y = 1 вывод работает на ВЫХОД
#include
Здесь вам может показаться все страшным и незнакомым, но на самом деле все не так. Код можно упростить, выкинув инициализацию неиспользуемых нами периферийных устройств МК. После упрощения он выглядит так:
#include
Всё хорошо. Но для того, чтобы светодиод замигал, нам нужно менять логический уровень на ножке PC0. Для этого в главный цикл нужно добавить несколько строк:
#include
Все, теперь код готов. Кликаем на пиктограму Build all Project files, чтобы скомпилировать (перевести в инструкции процессора МК) нашу программу. В папке Exe, которая находится в нашем проекте, должен появиться файл с расширением hex, это и есть наш файл прошивки для МК. Для того, чтобы нашу прошивку скормить виртуальному микроконтроллеру в Proteus, нужно два раза кликнуть на изображении микроконтроллера в протеусе. Появится вот такое окошко
 кликаем на пиктограму папки в поле Program File, выбераем hex - файл нашей прошивки и нажимаем кнопку ОК.
Теперь можно запустить симуляцию нашей схемы. Для этого нажимаем кнопку "Воспроизвести" в нижнем левом углу окна Протеус.
кликаем на пиктограму папки в поле Program File, выбераем hex - файл нашей прошивки и нажимаем кнопку ОК.
Теперь можно запустить симуляцию нашей схемы. Для этого нажимаем кнопку "Воспроизвести" в нижнем левом углу окна Протеус.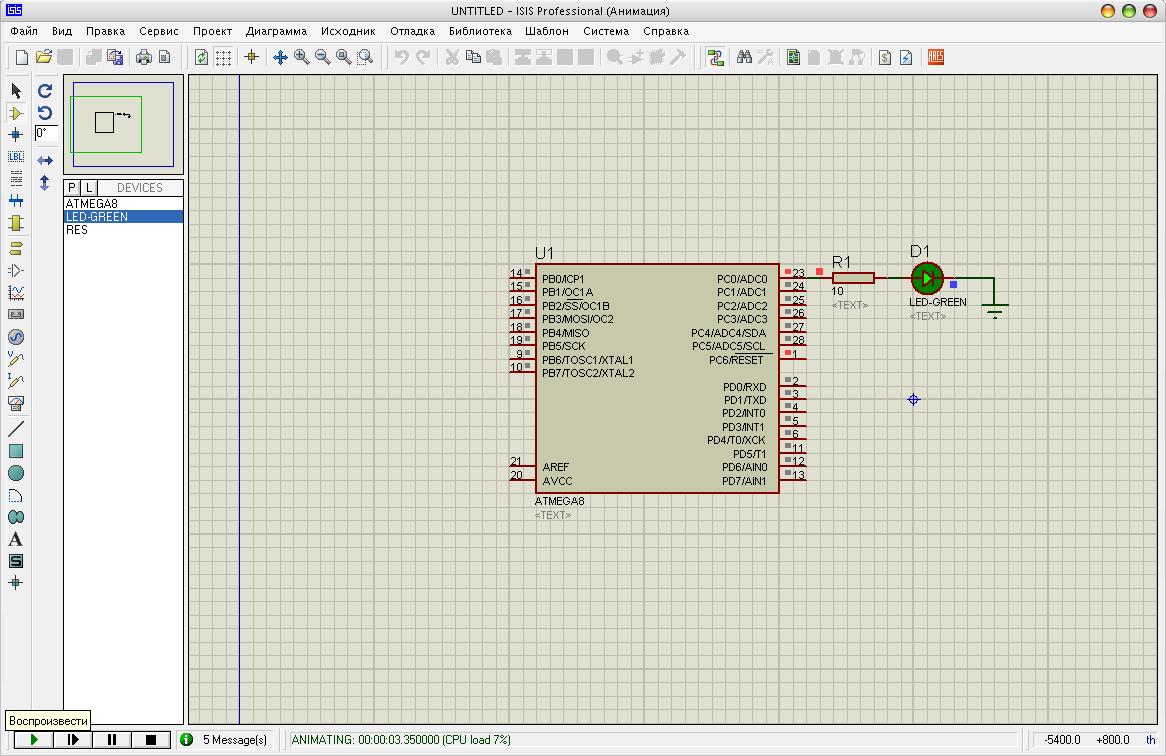
Здравствуйте, уважаемые Хабражители!
В этой статье я хочу рассказать о том, как однажды решил начать программировать микроконтроллеры, что для этого понадобилось и что в итоге получилось.
Тема микроконтроллеров меня заинтересовала очень давно, году этак в 2001. Но тогда достать программатор по месту жительства оказалось проблематично, а о покупке через Интернет и речи не было. Пришлось отложить это дело до лучших времен. И вот, в один прекрасный день я обнаружил, что лучшие времена пришли не выходя из дома можно купить все, что мне было нужно. Решил попробовать. Итак, что нам понадобится:
1. Программатор
На рынке предлагается много вариантов - от самых дешевых ISP (In-System Programming) программаторов за несколько долларов, до мощных программаторов-отладчиков за пару сотен. Не имея большого опыта в этом деле, для начала я решил попробовать один из самых простых и дешевых - USBasp. Купил в свое время на eBay за $12, сейчас можно найти даже за $3-4. На самом деле это китайская версия программатора от Thomas Fischl . Что могу сказать про него? Только одно - он работает. К тому же поддерживает достаточно много AVR контроллеров серий ATmega и ATtiny. Под Linux не требует драйвера.
Для прошивки надо соединить выходы программатора VCC, GND, RESET, SCK, MOSI, MISO с соответствующими выходами микроконтроллера. Для простоты я собрал вспомогательную схему прямо на макетной плате:

Слева на плате - тот самый микроконтроллер, который мы собираемся прошивать.
2. Микроконтроллер
С выбором микроконтроллера я особо не заморачивался и взял ATmega8 от Atmel - 23 пина ввода/вывода, два 8-битных таймера, один 16-битный, частота - до 16 Мгц, маленькое потребление (1-3.6 мА), дешевый ($2). В общем, для начала - более чем достаточно.
Под Linux для компиляции и загрузки прошивки на контроллер отлично работает связка avr-gcc + avrdude. Установка тривиальная. Следуя инструкции , можно за несколько минут установить все необходимое ПО. Единственный ньюанс, на который следует обратить внимание - avrdude (ПО для записи на контроллер) может потребовать права супер-пользователя для доступа к программатору. Выход - запустить через sudo (не очень хорошая идея), либо прописать специальные udev права. Синтаксис может отличаться в разных версиях ОС, но в моем случае (Linux Mint 15) сработало добавление следующего правила в файл /etc/udev/rules.d/41-atmega.rules:
# USBasp programmer SUBSYSTEM=="usb", ATTR{idVendor}=="16c0", ATTR{idProduct}=="05dc", GROUP="plugdev", MODE="0666"
После этого, естественно, необходим перезапуск сервиса
service udev restart
Компилировать и прошивать без проблем можно прямо из командной строки (кто бы сомневался), но если проектов много, то удобнее поставить плагин и делать все прямо из среды Eclipse.
Под Windows придется поставить драйвер. В остальном проблем нет. Ради научного интереса попробовал связку AVR Studio + eXtreme Burner в Windows. Опять-таки, все работает на ура.
Начинаем программировать
Программировать AVR контроллеры можно как на ассемблере (AVR assembler), так и на Си. Тут, думаю, каждый должен сделать свой выбор сам в зависимости от конкретной задачи и своих предпочтений. Лично я в первую очередь начал ковырять ассемблер. При программировании на ассемблере архитектура устройства становится понятнее и появляется ощущение, что копаешься непосредственно во внутренностях контроллера. К тому же полагаю, что в особенно критических по размеру и производительности программах знание ассемблера может очень пригодиться. После ознакомления с AVR ассемблером я переполз на Си.После знакомства с архитектурой и основными принципами, решил собрать что-то полезное и интересное. Тут мне помогла дочурка, она занимается шахматами и в один прекрасный вечер заявила, что хочет иметь часы-таймер для партий на время. БАЦ! Вот она - идея первого проекта! Можно было конечно заказать их на том же eBay, но захотелось сделать свои собственные часы, с блэк… эээ… с индикаторами и кнопочками. Сказано - сделано!
В качестве дисплея решено было использовать два 7-сегментных диодных индикатора. Для управления достаточно было 5 кнопок - “Игрок 1” , “Игрок 2” , “Сброс” , “Настройка” и “Пауза” . Ну и не забываем про звуковую индикацию окончания игры. Вроде все. На рисунке ниже представлена общая схема подключения микроконтроллера к индикаторам и кнопкам. Она понадобится нам при разборе исходного кода программы:

Разбор полета
Начнем, как и положено, с точки входа программы - функции main . На самом деле ничего примечательного в ней нет - настройка портов, инициализация данных и бесконечный цикл обработки нажатий кнопок. Ну и вызов sei() - разрешение обработки прерываний, о них немного позже.Int main(void)
{
init_io();
init_data();
sound_off();
sei();
while(1)
{
handle_buttons();
}
return 0;
}
Рассмотрим каждую функцию в отдельности.
Void init_io()
{
// set output
DDRB = 0xFF;
DDRD = 0xFF;
// set input
DDRC = 0b11100000;
// pull-up resistors
PORTC |= 0b00011111;
// timer interrupts
TIMSK = (1< Настройка портов ввода/вывода происходит очень просто - в регистр DDRx (где x - буква, обозначающая порт) записивается число, каждый бит которого означает, будет ли соответствующий пин устройством ввода (соответствует 0) либо вывода (соответствует 1). Таким образом, заслав в DDRB и DDRD число 0xFF, мы сделали B и D портами вывода. Соответственно, команда DDRC = 0b11100000; превращает первые 5 пинов порта C во входные пины, а оставшиеся - в выходные. Команда PORTC |= 0b00011111; включает внутренние подтягивающие резисторы на 5 входах контроллера. Согласно схеме, к этим входам подключены кнопки, которые при нажатии замкнут их на землю. Таким образом контроллер понимает, что кнопка нажата. Далее следует настройка двух таймеров, Timer0 и Timer1. Первый мы используем для обновления индикаторов, а второй - для обратного отсчета времени, предварительно настроив его на срабатывание каждую секунду. Подробное описание всех констант и метода настройки таймера на определенноый интервал можно найти в документации к ATmega8. Обработка прерываний
ISR (TIMER0_OVF_vect)
{
display();
if (_buzzer > 0)
{
_buzzer--;
if (_buzzer == 0)
sound_off();
}
}
ISR(TIMER1_COMPA_vect)
{
if (ActiveTimer == 1 && Timer1 > 0)
{
Timer1--;
if (Timer1 == 0)
process_timeoff();
}
if (ActiveTimer == 2 && Timer2 > 0)
{
Timer2--;
if (Timer2 == 0)
process_timeoff();
}
}
При срабатывании таймера управление передается соответствующему обработчику прерывания. В нашем случае это обработчик TIMER0_OVF_vect, который вызывает процедуру вывода времени на индикаторы, и TIMER1_COMPA_vect, который обрабатывает обратный отсчет. Вывод на индикаторы
Void display()
{
display_number((Timer1/60)/10, 0b00001000);
_delay_ms(0.25);
display_number((Timer1/60)%10, 0b00000100);
_delay_ms(0.25);
display_number((Timer1%60)/10, 0b00000010);
_delay_ms(0.25);
display_number((Timer1%60)%10, 0b00000001);
_delay_ms(0.25);
display_number((Timer2/60)/10, 0b10000000);
_delay_ms(0.25);
display_number((Timer2/60)%10, 0b01000000);
_delay_ms(0.25);
display_number((Timer2%60)/10, 0b00100000);
_delay_ms(0.25);
display_number((Timer2%60)%10, 0b00010000);
_delay_ms(0.25);
PORTD = 0;
}
void display_number(int number, int mask)
{
PORTB = number_mask(number);
PORTD = mask;
}
Функция display использует метод динамической индикации. Дело в том, что каждый отдельно взятый индикатор имеет 9 контактов (7 для управления сегментами, 1 для точки и 1 для питания). Для управления 4 цифрами понадобилось бы 36 контактов. Слишком расточительно. Поэтому вывод разрядов на индикатор с несколькими цифрами организован по следующему принципу: Напряжение поочередно подается на каждый из общих контактов, что позволяет высветить на соответствующем индикаторе нужную цифру при помощи одних и тех же 8 управляющих контактов. При достаточно высокой частоте вывода это выглядит для глаза как статическая картинка. Именно поэтому все 8 питающих контактов обоих индикаторов на схеме подключены к 8 выходам порта D, а 16 управляющих сегментами контактов соединены попарно и подключены к 8 выходам порта B. Таким образом, функция display с задержкой в 0.25 мс попеременно выводит нужную цифру на каждый из индикаторов. Под конец отключаются все выходы, подающие напряжение на индикаторы (команда PORTD = 0;). Если этого не сделать, то последняя выводимая цифра будет продолжать гореть до следующего вызова функции display, что приведет к ее более яркому свечению по сравнению с остальными. Обработка нажатий
Void handle_buttons()
{
handle_button(KEY_SETUP);
handle_button(KEY_RESET);
handle_button(KEY_PAUSE);
handle_button(KEY_PLAYER1);
handle_button(KEY_PLAYER2);
}
void handle_button(int key)
{
int bit;
switch (key)
{
case KEY_SETUP: bit = SETUP_BIT; break;
case KEY_RESET: bit = RESET_BIT; break;
case KEY_PAUSE: bit = PAUSE_BIT; break;
case KEY_PLAYER1: bit = PLAYER1_BIT; break;
case KEY_PLAYER2: bit = PLAYER2_BIT; break;
default: return;
}
if (bit_is_clear(BUTTON_PIN, bit))
{
if (_pressed == 0)
{
_delay_ms(DEBOUNCE_TIME);
if (bit_is_clear(BUTTON_PIN, bit))
{
_pressed |= key;
// key action
switch (key)
{
case KEY_SETUP: process_setup(); break;
case KEY_RESET: process_reset(); break;
case KEY_PAUSE: process_pause(); break;
case KEY_PLAYER1: process_player1(); break;
case KEY_PLAYER2: process_player2(); break;
}
sound_on(15);
}
}
}
else
{
_pressed &= ~key;
}
}
Эта функция по очереди опрашивает все 5 кнопок и обрабатывает нажатие, если таковое случилось. Нажатие регистрируется проверкой bit_is_clear(BUTTON_PIN, bit) , т.е. кнопка нажата в том случае, если соответствующий ей вход соединен с землей, что и произойдет, согласно схеме, при нажатии кнопки. Задержка длительностью DEBOUNCE_TIME и повторная проверка нужна во избежание множественных лишних срабатываний из-за дребезга контактов. Сохранение статуса нажатия в соответствующих битах переменной _pressed используется для исключения повторного срабатывания при длительном нажатии на кнопку. Полный текст программы
#define F_CPU 4000000UL
#include Прототип был собран на макетной плате. Принципиальная схема программатора на LPT порт показана на рисунке.
В качестве шинного формирователя используйте микросхему 74AC
244
или 74HC244 (К1564АП5), 74LS244 (К555АП5) либо 74ALS244 (К1533АП5). Светодиод VD1 индицирует режим записи микроконтроллера, светодиод VD2 - чтения, светодиод VD3 - наличие питания схемы. Напряжение, необходимое для питания схема берёт с разъёма ISP,
т.е. от программируемого устройства. Эта схема является
переработанной схемой программатора STK200/300 (добавлены светодиоды
для удобства работы), поэтому она совместима со всеми программами
программаторов на PC, работающих со схемой STK200/300. Для работы с
этим программатором используйтепрограмму
CVAVR
Программатор можно выполнить на печатной плате и поместить её в
корпус разъёма LPT, как показано на рисунках:
Функции обработки нажатий достаточно тривиальны и полагаю, что в дополнительных комментариях не нуждаются.
Для работы с программатором удобно использовать удлинитель LPT
порта, который несложно изготовить самому (к примеру, из кабеля
Centronix для принтера), главное "не жалеть" проводников для земли
(18-25 ноги разъёма) или купить. Кабель между программатором и
программируемой микросхемой не должен превышать 20-30 см.